Сегодня автор Instructables под ником Techgenie рассказал о втором варианте своей робозмеи, где электроника есть. И привёл ссылку на первый, в котором её нет — только электрика. Он элегантнее, о нём и пойдёт речь в моём переводе.
Если вы всё ещё не хотите, чтобы она у вас была, посмотрите видео, и пожелаете такой девайс себе домой с первых секунд просмотра:
Звенья робозмеи мастер вырезает из картона:
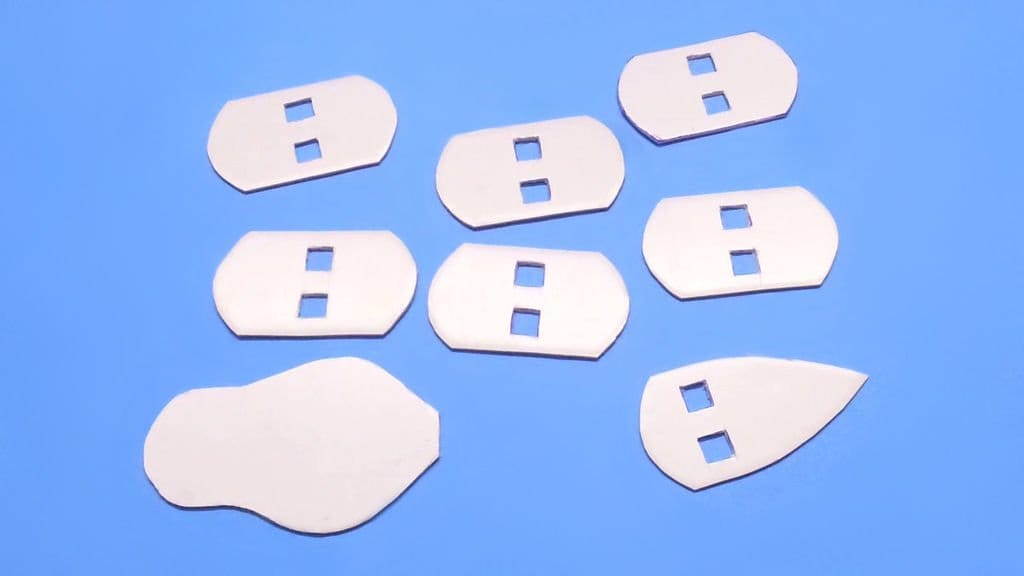
Извлекает из листа:

Проделывает в них квадратные отверстия для роликов:
Которые изготавливает из бусин и скрепок, привет «ДУ Василия Билецкого»:
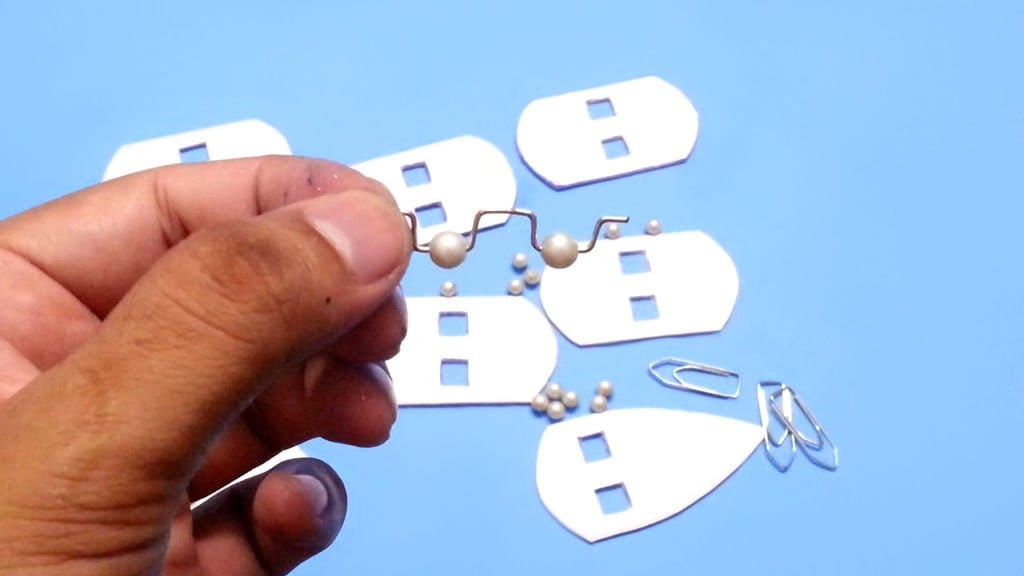
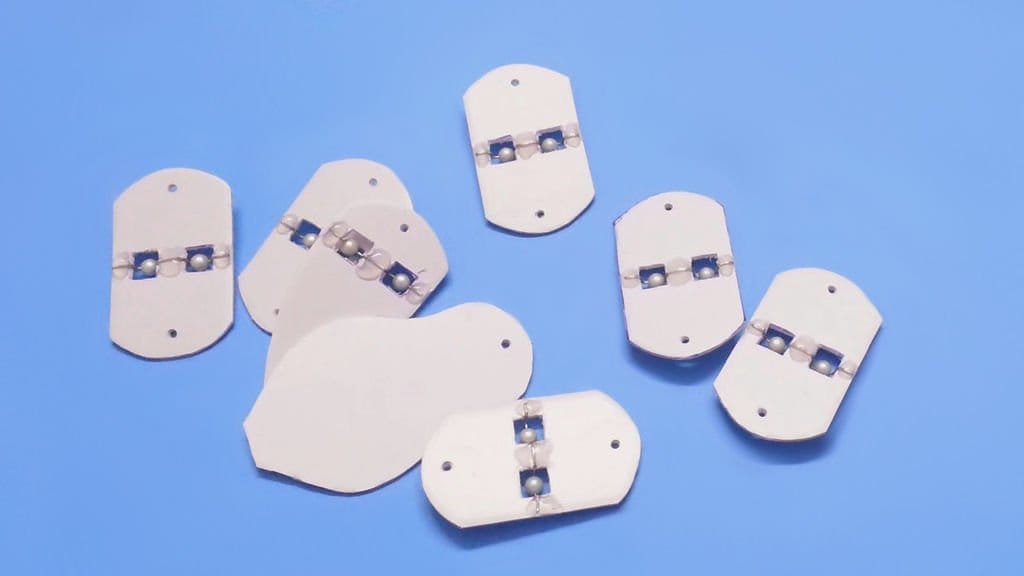
Закрепляет оси роликов клеевым пистолетом, следит, чтобы сами ролики не заклинило клеем. Сверлит отверстия для соединения звеньев:
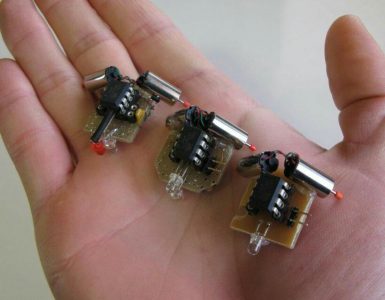
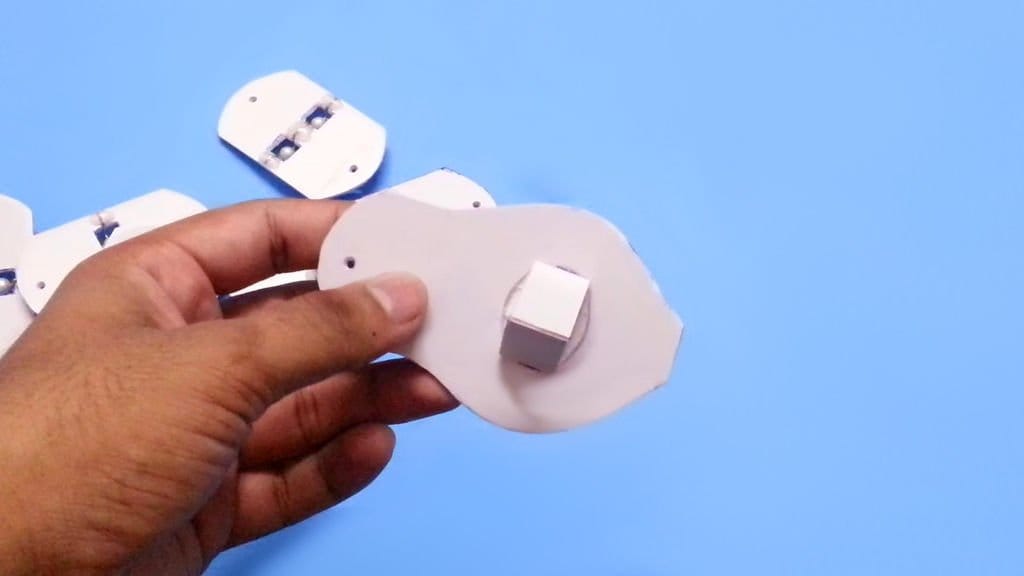
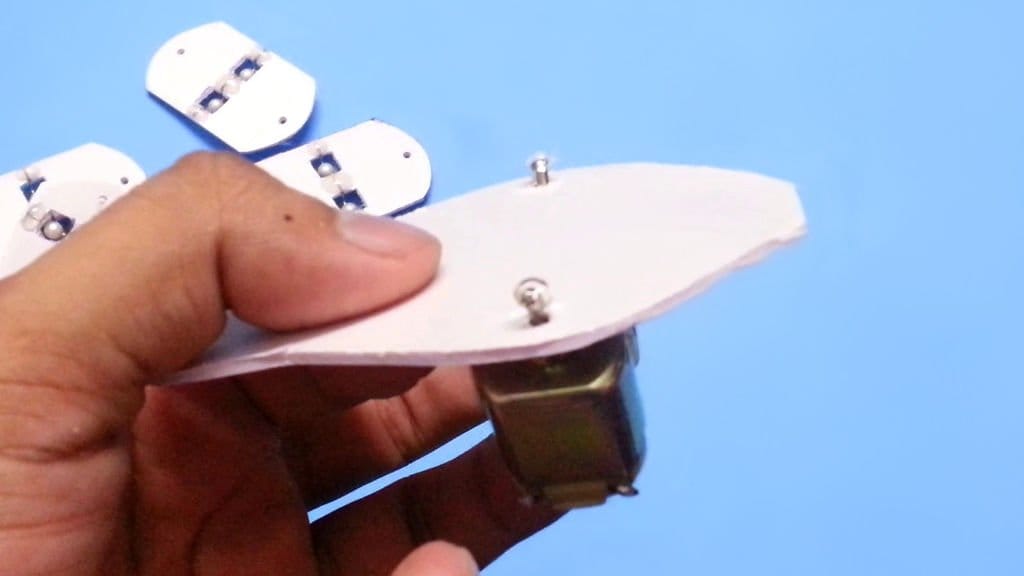
Приклеивает треугольный держатель двигателей постоянного тока:
Прикладывает двигатели, отмечает, где сверлить отверстия под валы, сверлит, продевает валы, приклеивает двигатели:
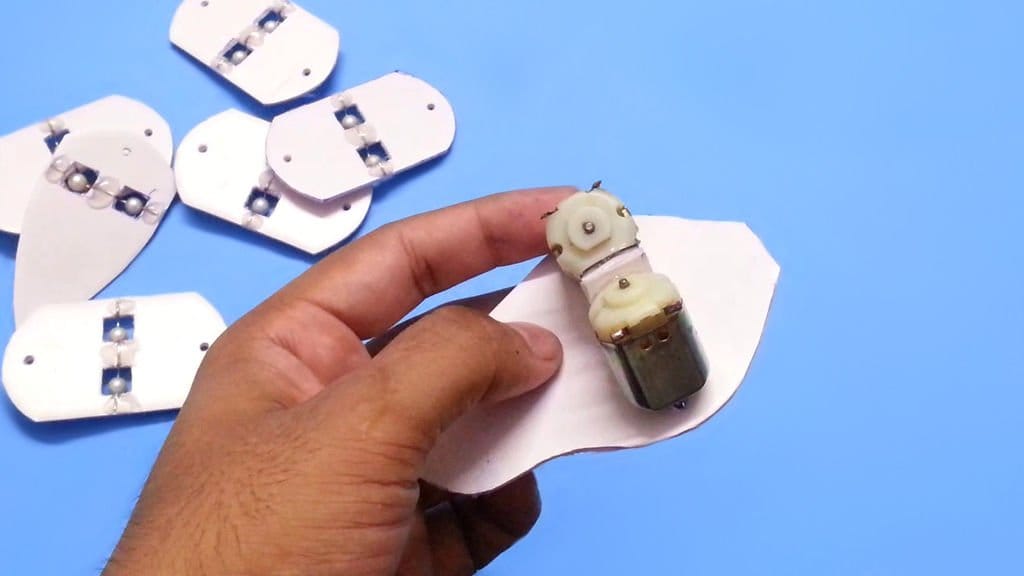
На валах двигателей делает шарики из термоклея:
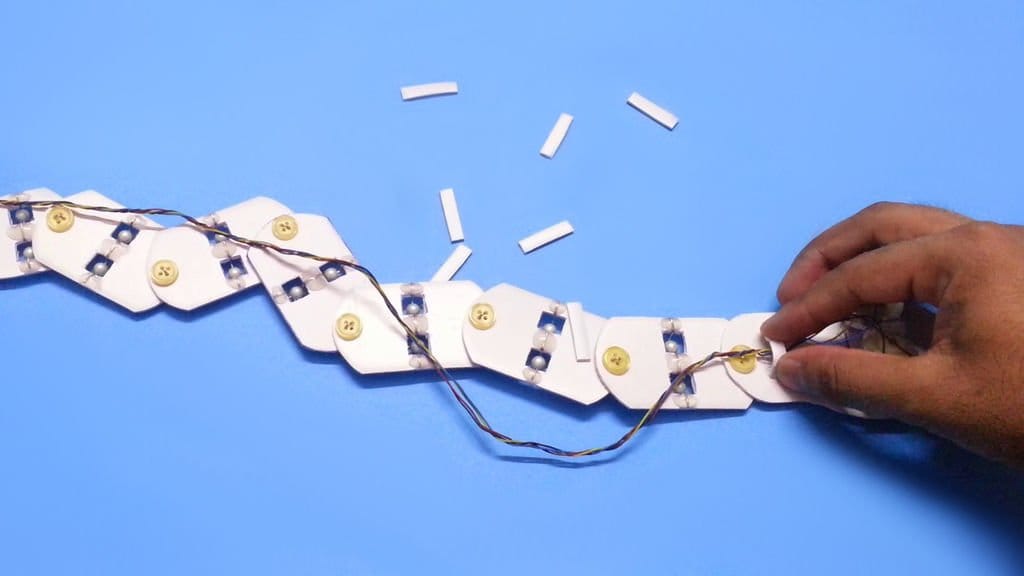
Соединяет звенья при помощи… проволоки и пуговиц:

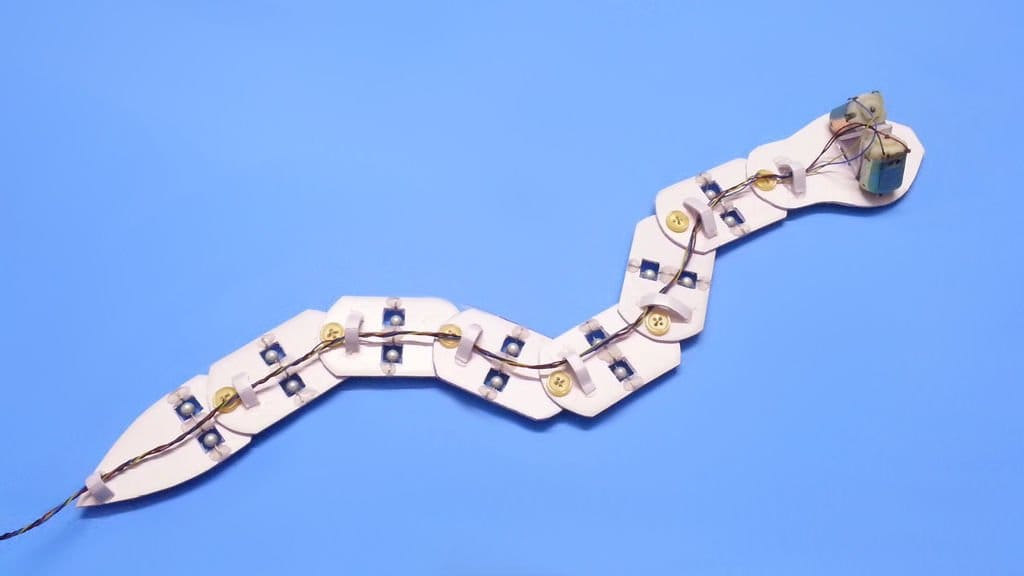
Робозмея собрана, но она пока неподвижна:

Вырезает картонные полосочки, берёт четырёхпроводной кабель, припаивает к каждому из двигателей по два провода, закрепляет первой полосочкой:
И остальными:
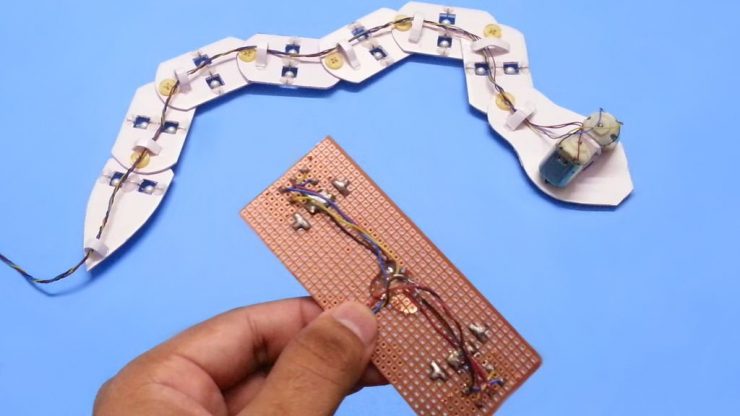
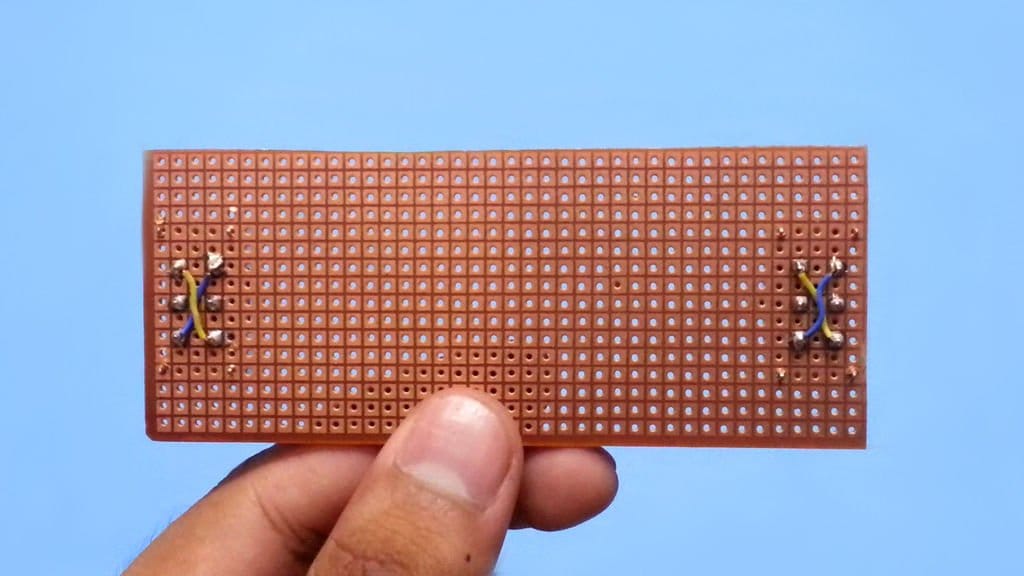
Берёт два переключателя на три положения (среднее — отключённое) и два направления, а также кусок макетки типа perfboard:
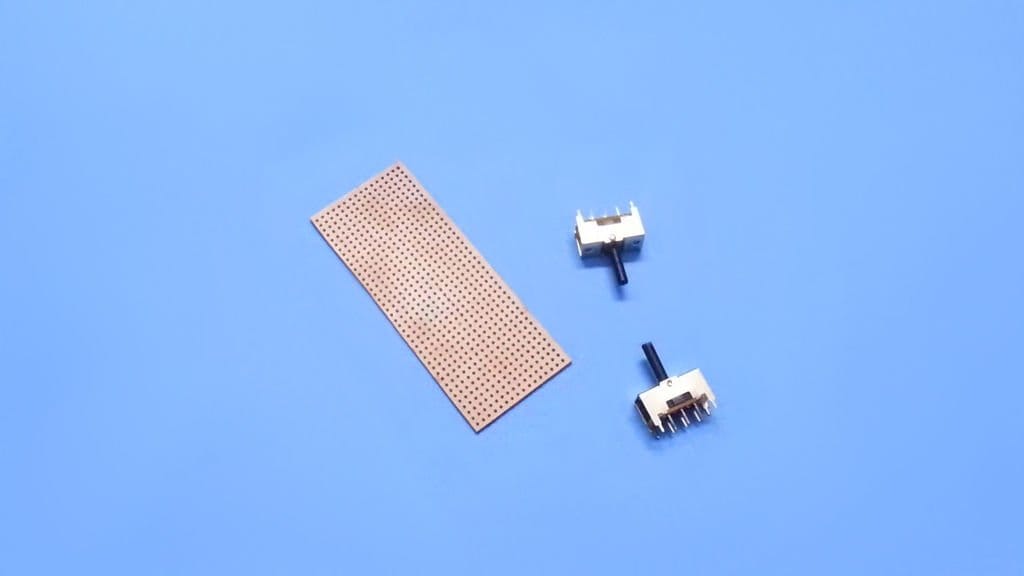
При помощи перемычек оба переключателя превращает в реверсивные:
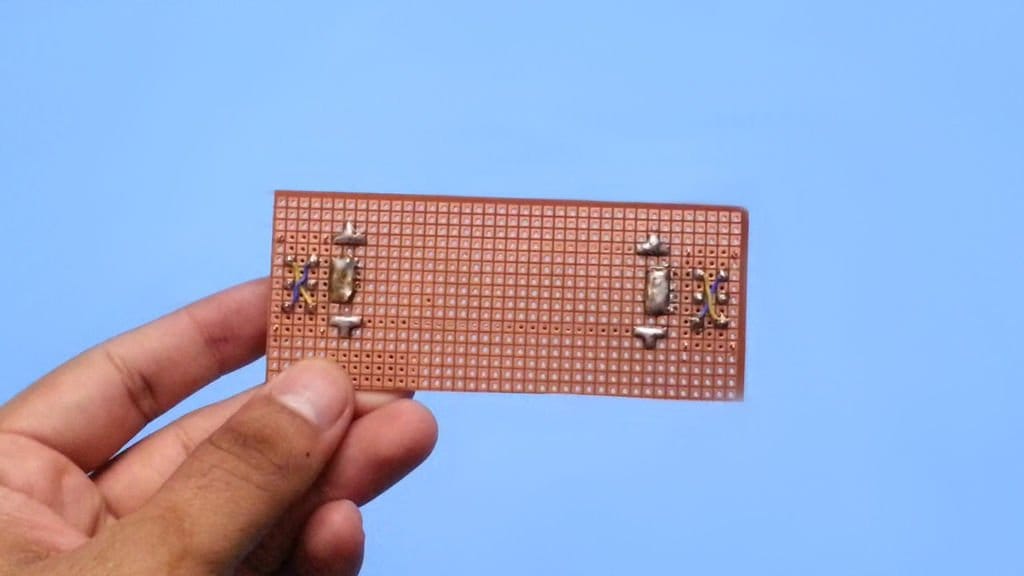
Из скрепок изготавливает пружины для аккумулятора 18650, ставит его. Так не делать! Взять готовый отсек! Аккумулятор применять только с защитой! Ещё лучше отсек под 2 шт. АА или ААА с соответствующими элементами или аккумуляторами.

Продольные скрепки добавляет, чтобы аккумулятор держался на месте:
Так пока выглядит оборотная сторона платы пульта:
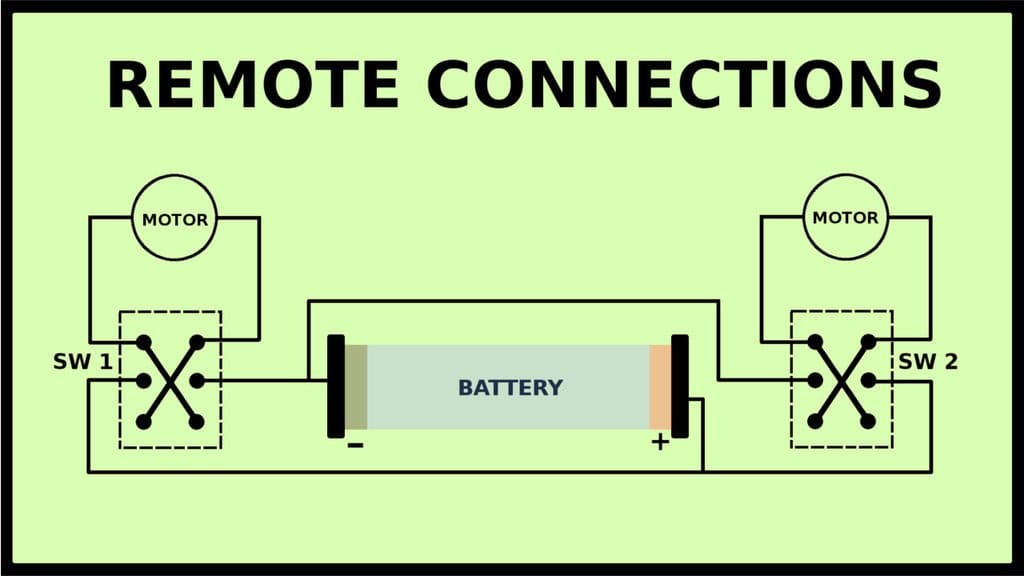
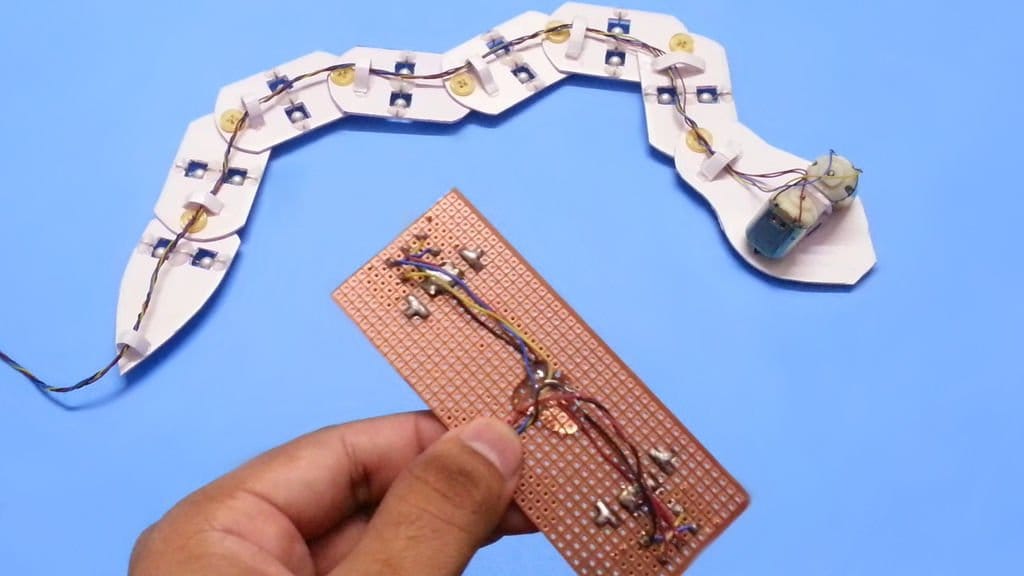
Мастер подключает кабель робозмеи, выполняет соединения по схеме:
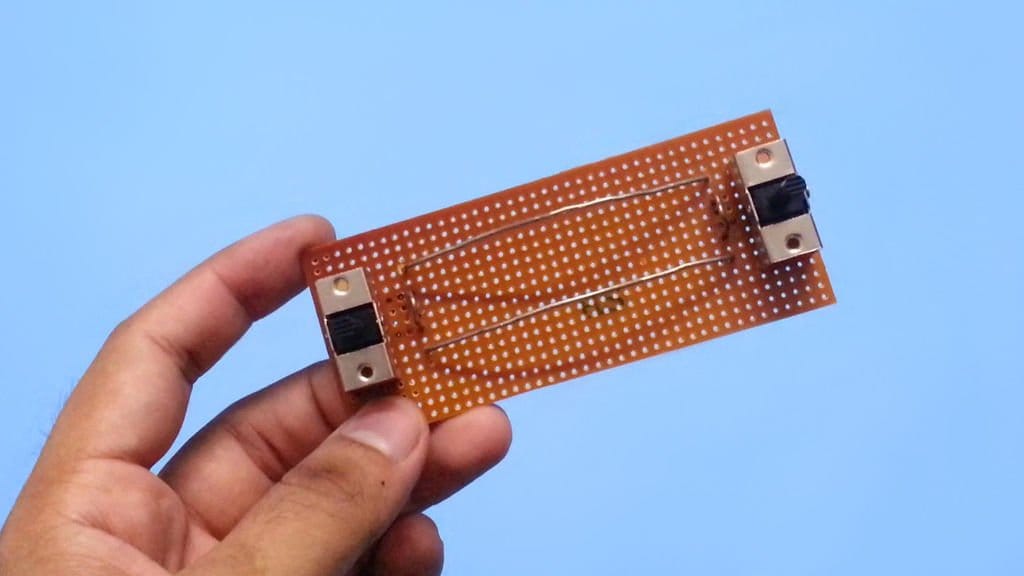
Теперь оборотная сторона платы пульта выглядит по-другому. Кабель закреплён термоклеем, важно, чтобы между ним и макеткой был изолирующий слой этого клея. Теперь эту сторону платы нужно закрыть диэлектриком, поскольку при отключении двигателей возникают импульсы самоиндукции.
Вот всё и готово:
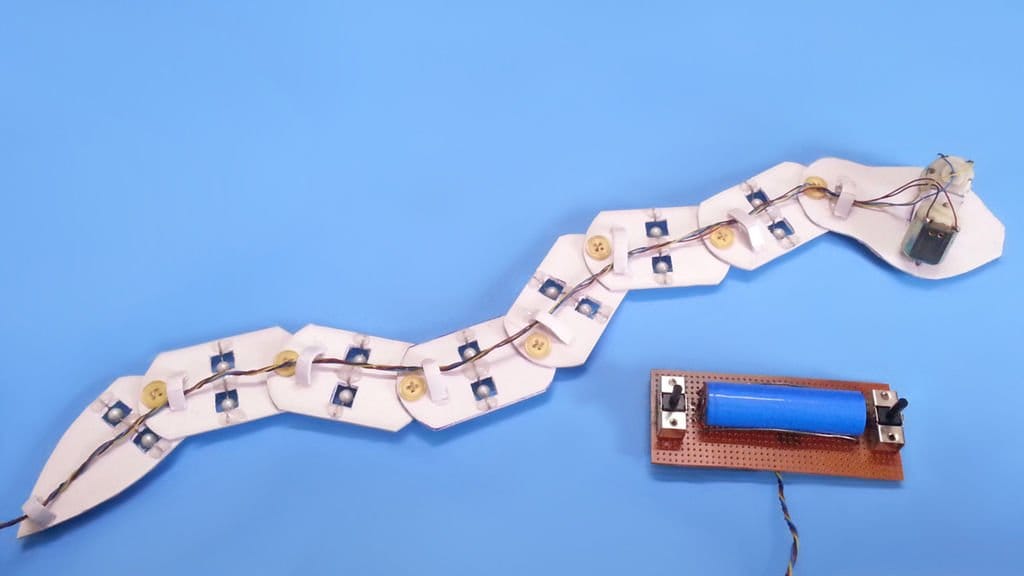
В силу конструктивных особенностей робозмеи, при одинаковых положениях переключателя двигатели должны вращаться в противоположных направлениях. Если это не так, один из них надо переполюсовать. После этого опытным путём выбирают положение пульта, при котором верхнему положению обоих переключателей соответствует перемещение вперёд. Двигатели можно останавливать и реверсировать по отдельности, заставляя робозмею выполнять различные трюки.