
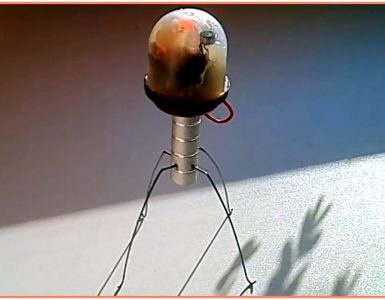
Роботом, следующим по линии или выполняющим иной несложный алгоритм, давно никого не удивишь. Если, конечно, он не настолько миниатюрен, как эти три самоделки автора Hackaday.io под ником shlonkin. Если посмотреть на них спереди и снизу, становится понятно, чем же они друг от друга отличаются:

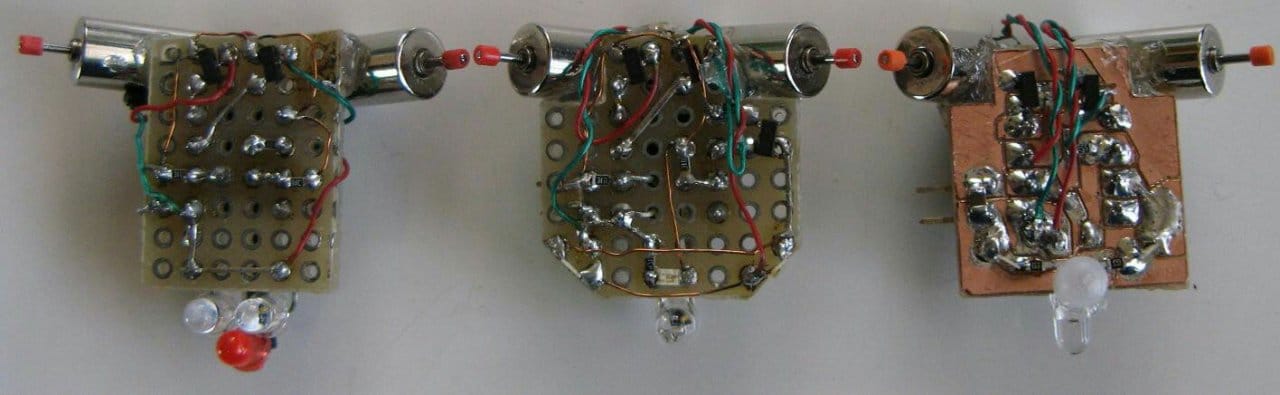
У первого робота оба фототранзистора направлены вниз, и ещё есть один светодиод, направленный также вниз. Он может определять текущую яркость поверхности под каждым из них и её изменение при перемещении. В частности, можно запрограммировать его так, чтобы он действовал как классический робот, следующий по линии:
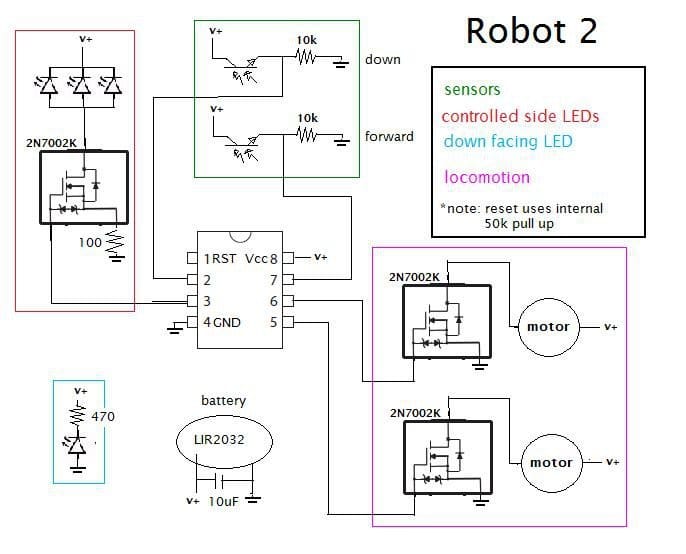
У второго робота вниз направлен только один из двух фототранзисторов. Поэтому следовать по линии он не может, ведь так не определить, в какую сторону поворачивать. Зато благодаря второму фототранзистору, направленному вперёд, он определяет яркость расположенного впереди источника света или освещённость поверхности расположенного впереди предмета. Также у робота имеются три запараллеленных светодиода, из которых два светят вперёд и чуть вбок, а третий — вниз. Управлять ими можно только одновременно.
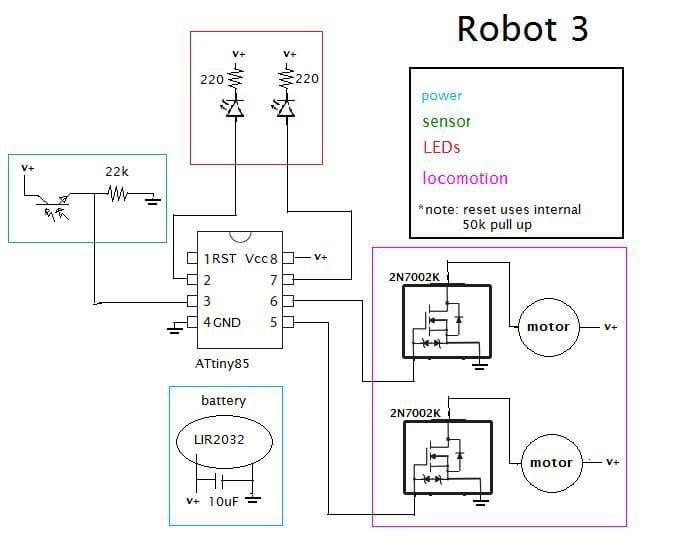
У третьего робота один фототранзистор, направленный вперёд, а по бокам от него — два независимо управляемых светодиода, направленных также вперёд. Переключая их попеременно, по сигналу с фототранзистора можно определить, с какой стороны препятствие, и объехать его. Программная поддержка этой функции ещё не готова. Из-за того, что фототранзистора, направленного вниз, у робота нет, внизу пришлось разместить упор.
Все три робота выполнены на микроконтроллерах ATtiny85 и питаются от аккумуляторов LIR2032, совпадающих по размерам с элементами CR2032, но, в отличие от них, перезаряжаемых. В Японии, где живёт автор, такие аккумуляторы можно купить в составе перезаряжаемых фонарей в магазинах «всё за 100 йен». Из-за того, что количество фототранзисторов и светодиодов у микророботов различное, схемы их также разные. Но во всех случаях двигатели управляются очень интересными МОП-транзисторами 2N7002K со встроенными защитными диодами и стабилитронами. Во втором роботе, где три светодиода запараллелены, они подключены к микроконтроллеру не напрямую, а через ключ на таком же транзисторе.

Все фототранзисторы применены типа ASDL-6620, электродвигатели — от популярных в прошлом пейджеров. От аналогичных двигателей, применяемых сегодня в мобильных телефонов, они отличаются габаритами. Эксцентрики с валов двигателей сняты, вместо них надеты ролики из трубки.
ПО для роботов представлено в двух вариантах. Один из них предназначен для Arduino IDE, другой, удалённый с Github (в оригинале ссылка битая, поэтому здесь она не приведена), написан на C++, но всё равно использует ардуиновские библиотеки. Первый микроробот под управлением этого ПО действует как классический робот, следующий по линии, второй — исследует поверхность и подаёт световые сигналы другим таким же роботам, а третий будет объезжать препятствия после того, как разработчик эту часть ПО доделает. Первый два робота собраны на макетных платах типа perfboard, третий — на печатной плате.




{kind=link}