Если вы делаете свой первый квадрокоптер, и у вас нет 3D-принтера, тогда эта инструкция для вас. На пути к построению этого квадрокоптера мастер сделал семь моделей, и у каждой были свои, существенные недостатки. Наконец он смог, путем проб и ошибок, сделать эту, работающую модель.
Инструменты и материалы:
— Фанера толщиной 7 мм и размером примерно 30 x 22 см;
— Алюминиевая профильная труба 25*25 мм — 1 метр;
-Пропеллеры размером 1045;
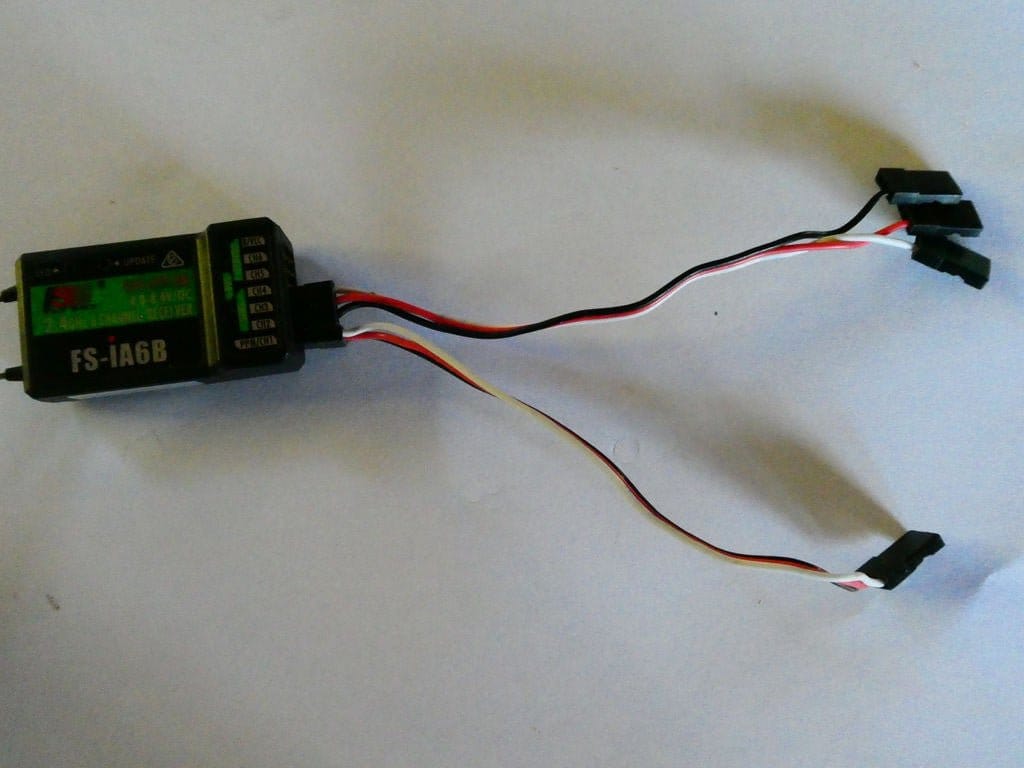
— Приемник и контроллер;
-Motors и ESCs x 4;
-Изолента;
-Панель управления;
-Крепеж;
-Батарея Lipo;
-Зарядное устройство;
-Провода;
-Фиксатор резьбы;
-Паяльные принадлежности;
-Разъемы XT60;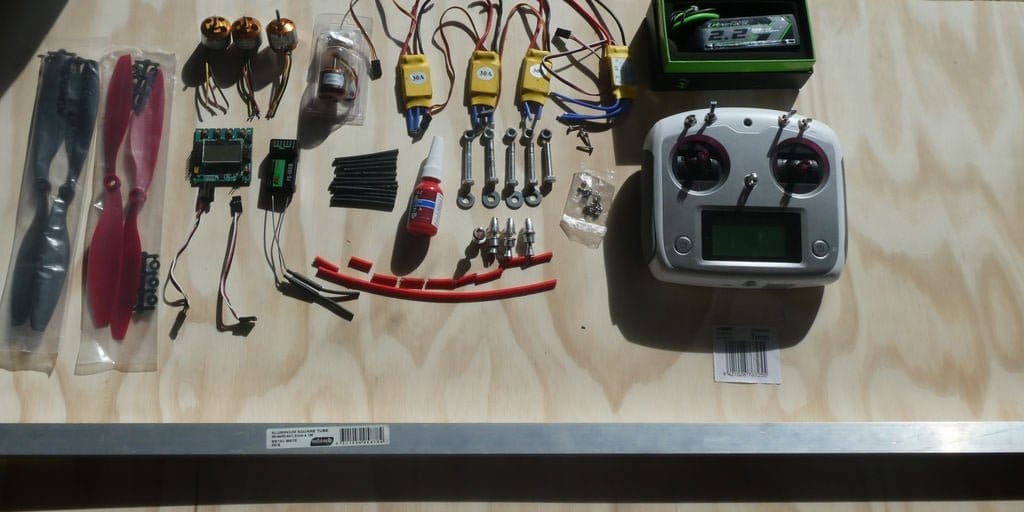

 Шаг первый: корпус
Шаг первый: корпус
Напечатайте шаблон и приклейте его на фанеру. Вырежьте детали и просверлите все отверстия.
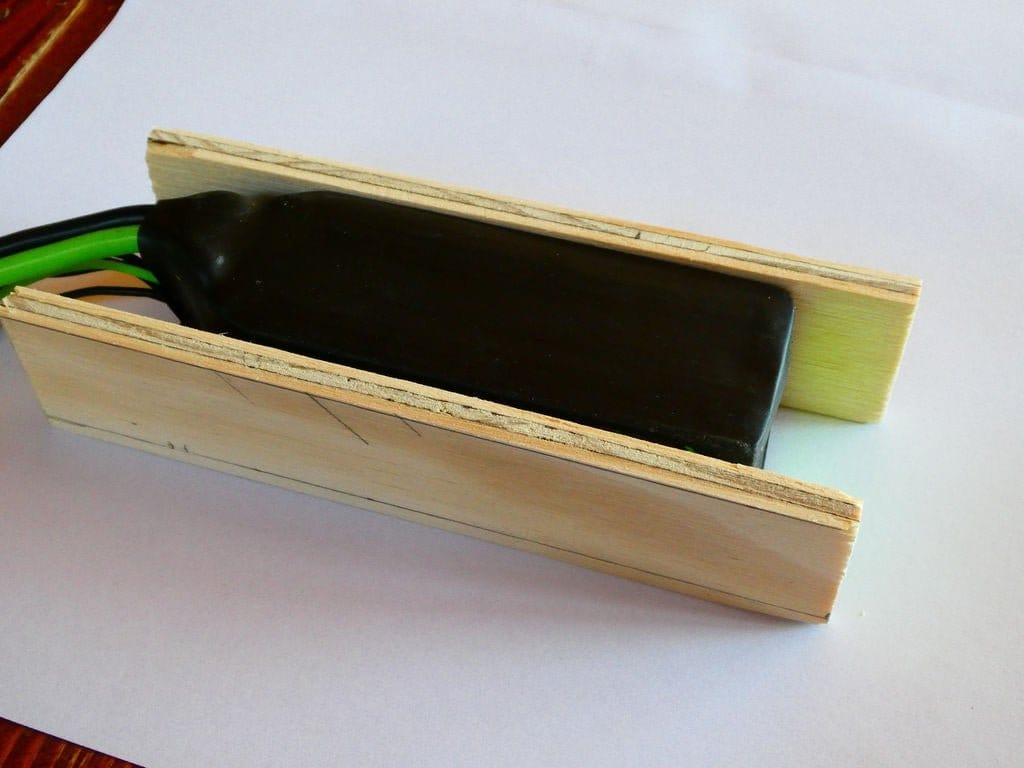
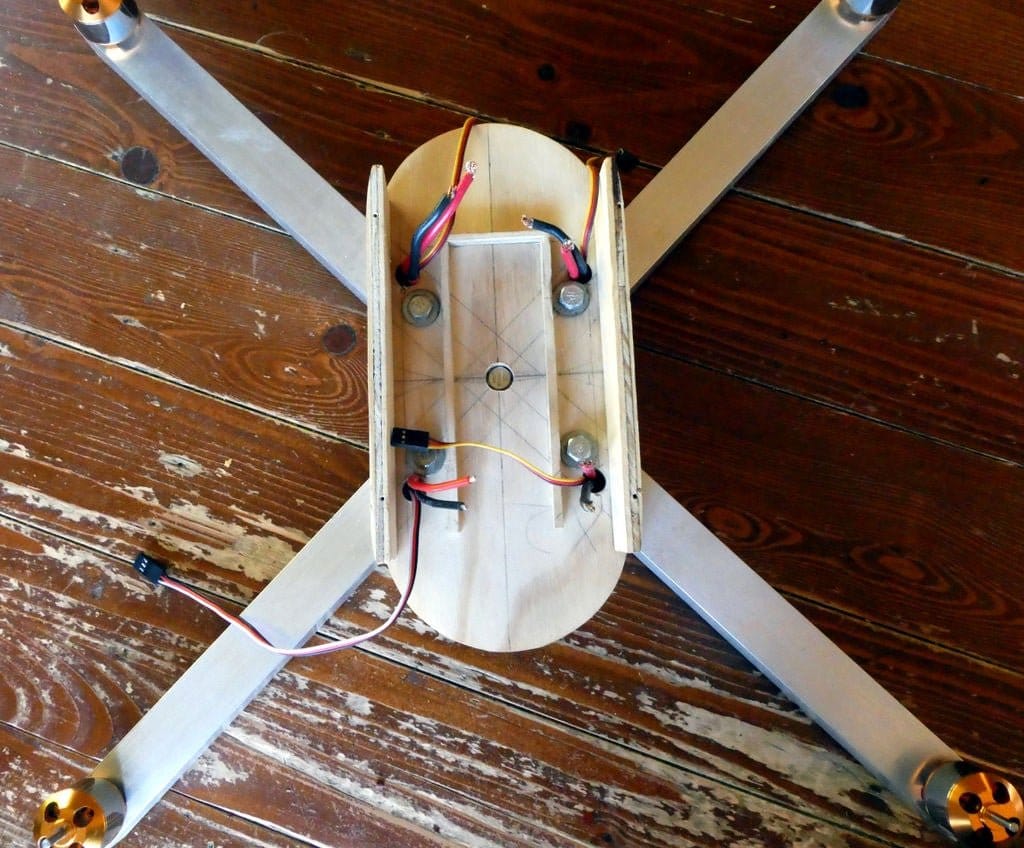
Установите аккумулятор на основание и отбалансируйте основание. Очертите аккумулятор. Приклейте планки с трех сторон аккумулятора. 


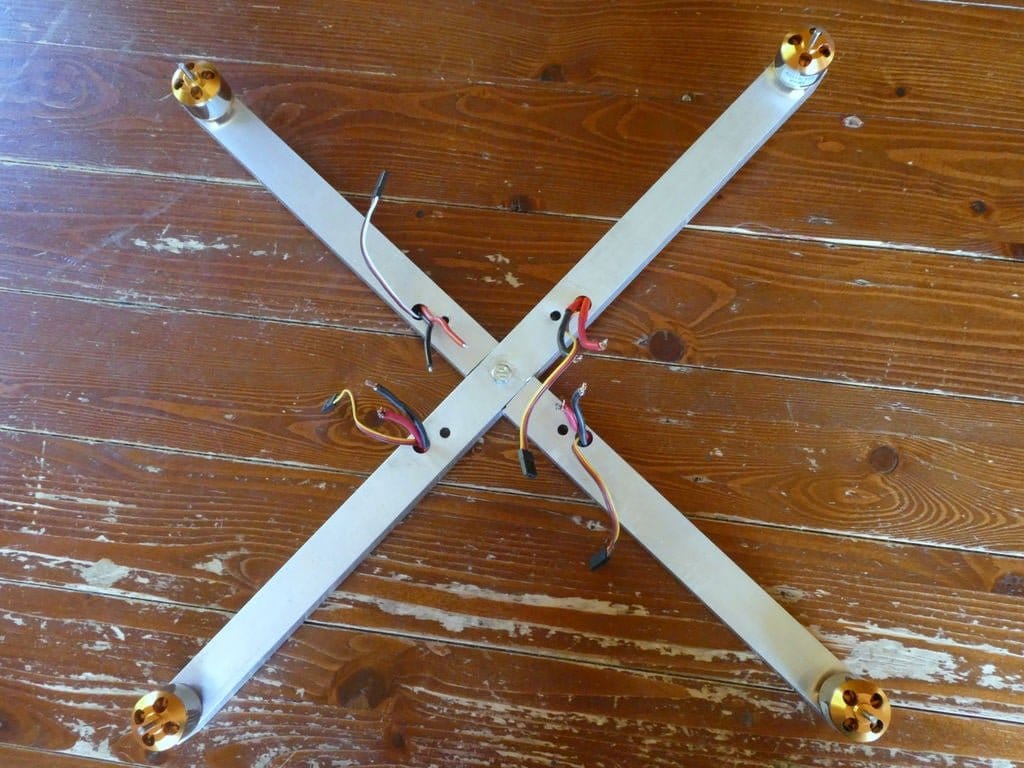
 Шаг второй: рама
Шаг второй: рама
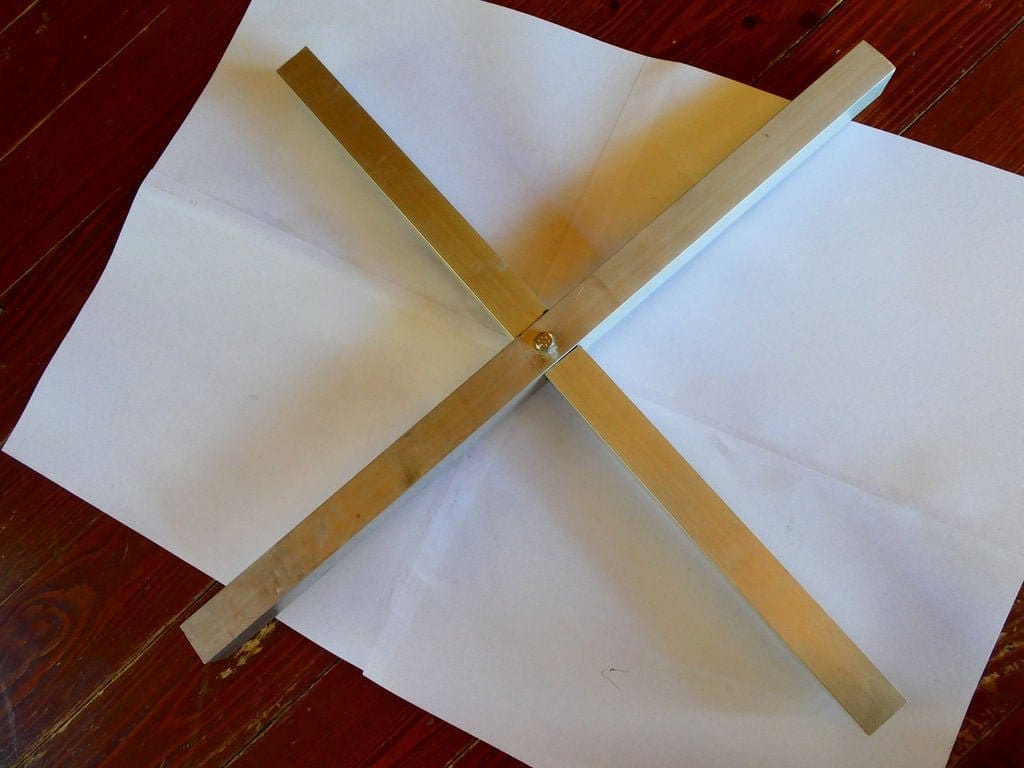
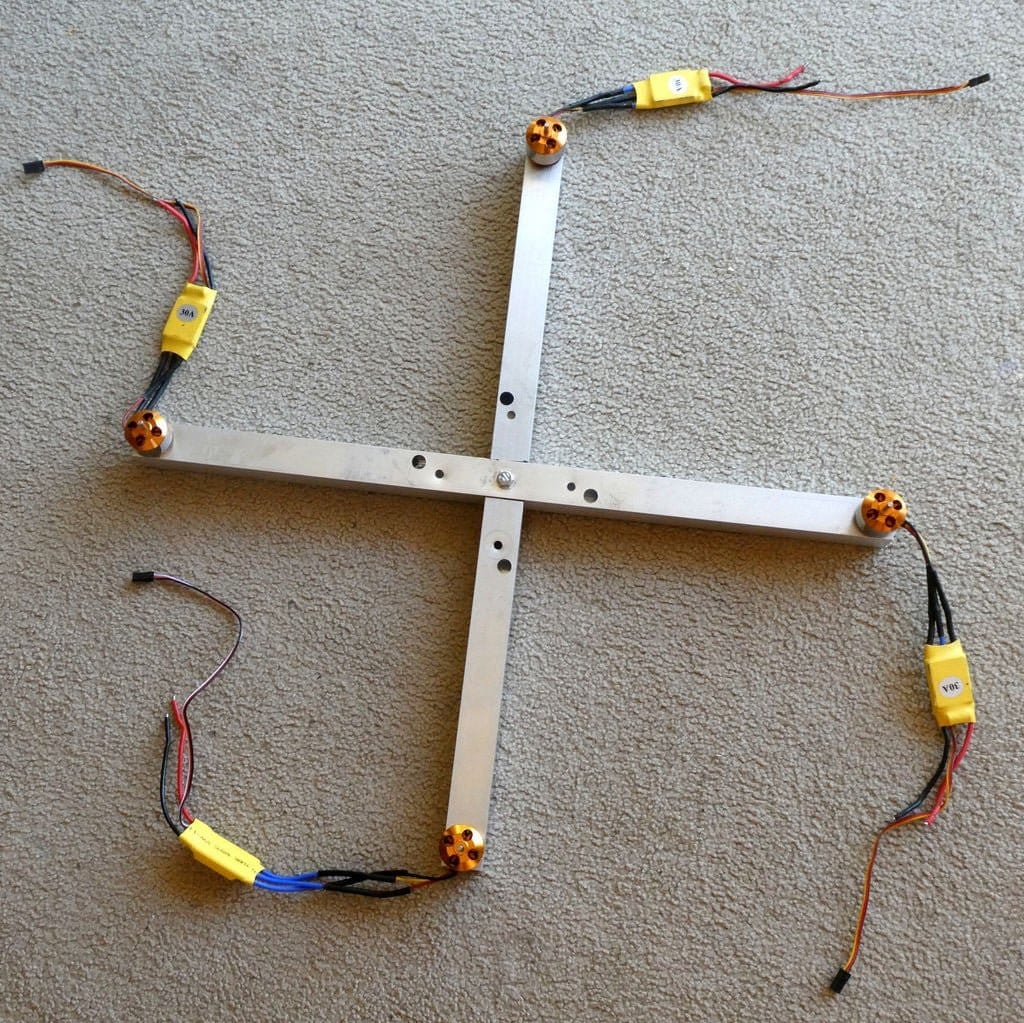
Разрежьте алюминиевую профильную трубу на две равные части (по 50 см). Вырежьте по середине труб два паза по 2,5 см. Просверлите по центру отверстия. Соберите крестовину и закрепите болтом.
 Теперь используйте крепление двигателя, которое поставляется с ними, чтобы разметит крепежные отверстия. Просверлите отверстия. Заусеницы нужно зашлифовать.
Теперь используйте крепление двигателя, которое поставляется с ними, чтобы разметит крепежные отверстия. Просверлите отверстия. Заусеницы нужно зашлифовать.

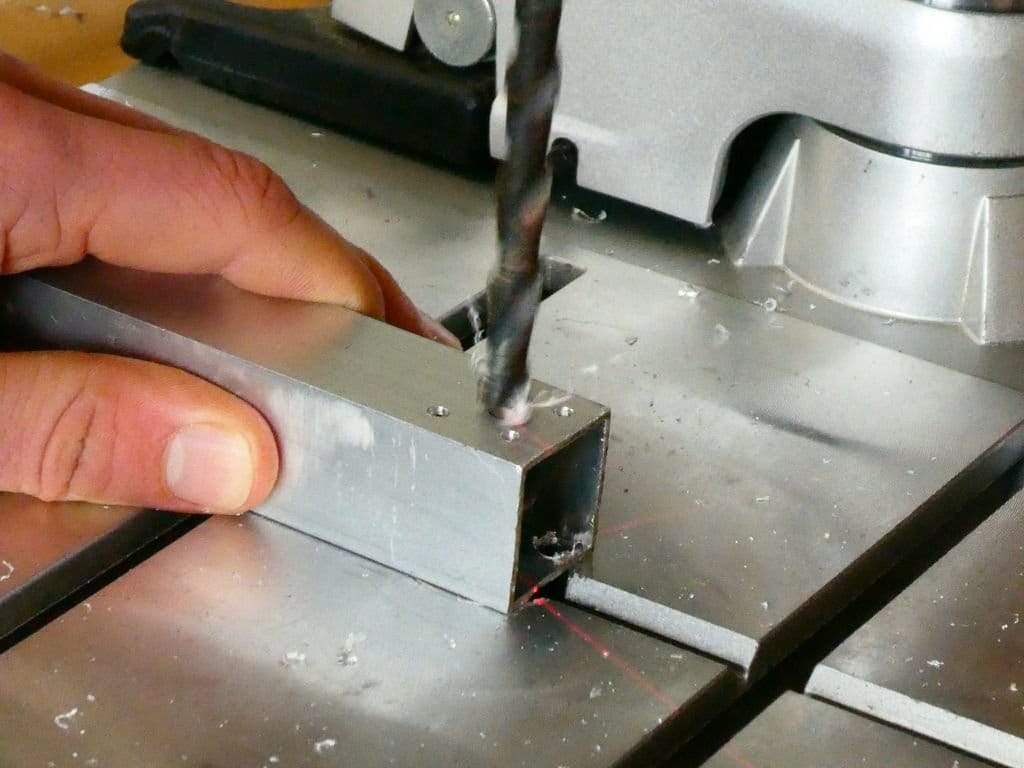 Разметьте и просверлите крепежные отверстия для крепления корпуса к раме.
Разметьте и просверлите крепежные отверстия для крепления корпуса к раме.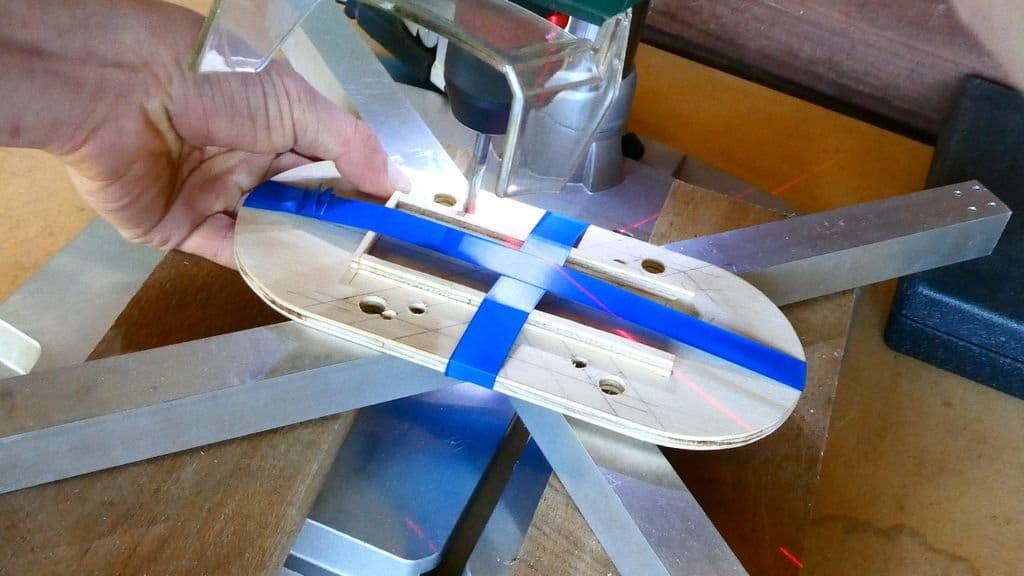 Приклейте к корпусу боковые планки.
Приклейте к корпусу боковые планки. 
 Шаг третий: монтаж
Шаг третий: монтаж
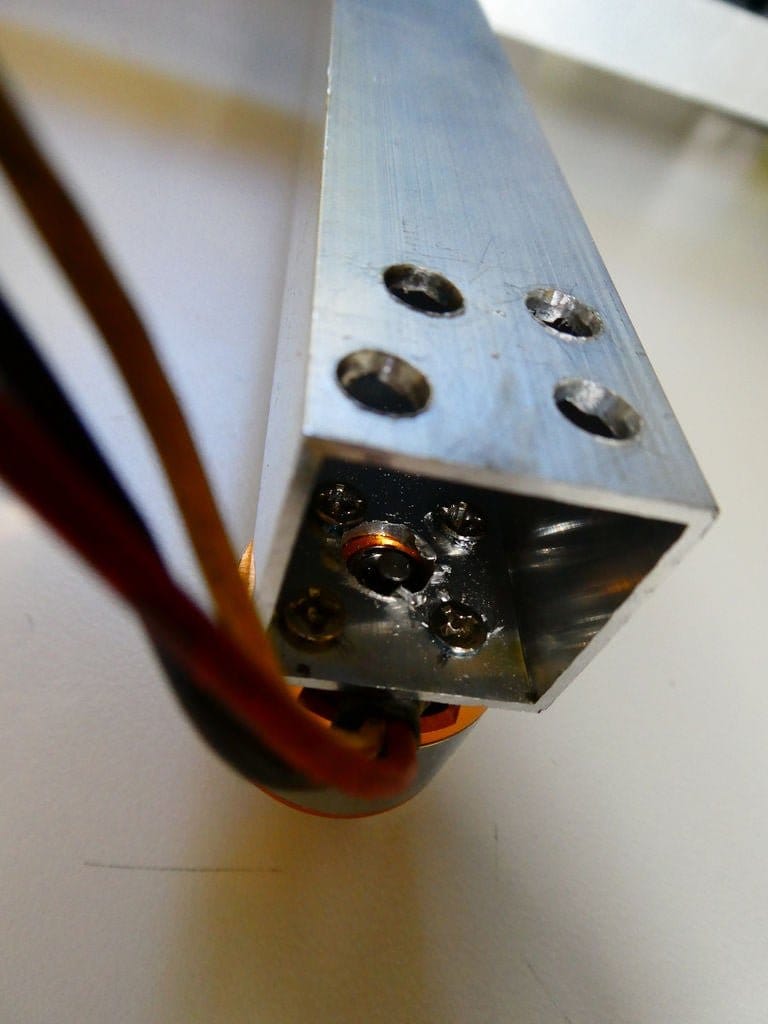
Теперь нужно закрепить моторы на раме. На крепежные винты обязательно нужно нанести фиксатор резьбы, в противном случае, винты выкрутятся и моторы улетят.
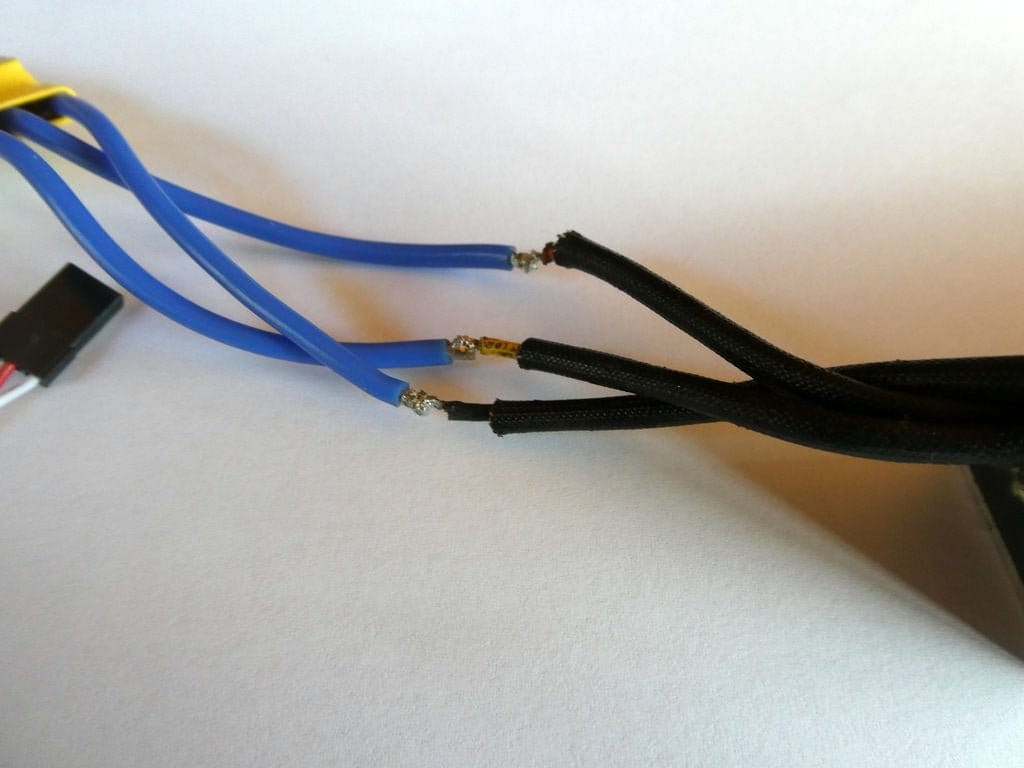
Подключите ESC к двигателям так, чтобы верхний левый двигатель вращался по часовой стрелке, верхний правый двигатель вращался против часовой стрелки, нижний правый двигатель вращался по часовой стрелке, а нижний левый двигатель вращался против часовой стрелки. Чтобы изменить направление вращения двигателей, поменяйте местами любые два из трех проводов. Заизолируйте соединения.
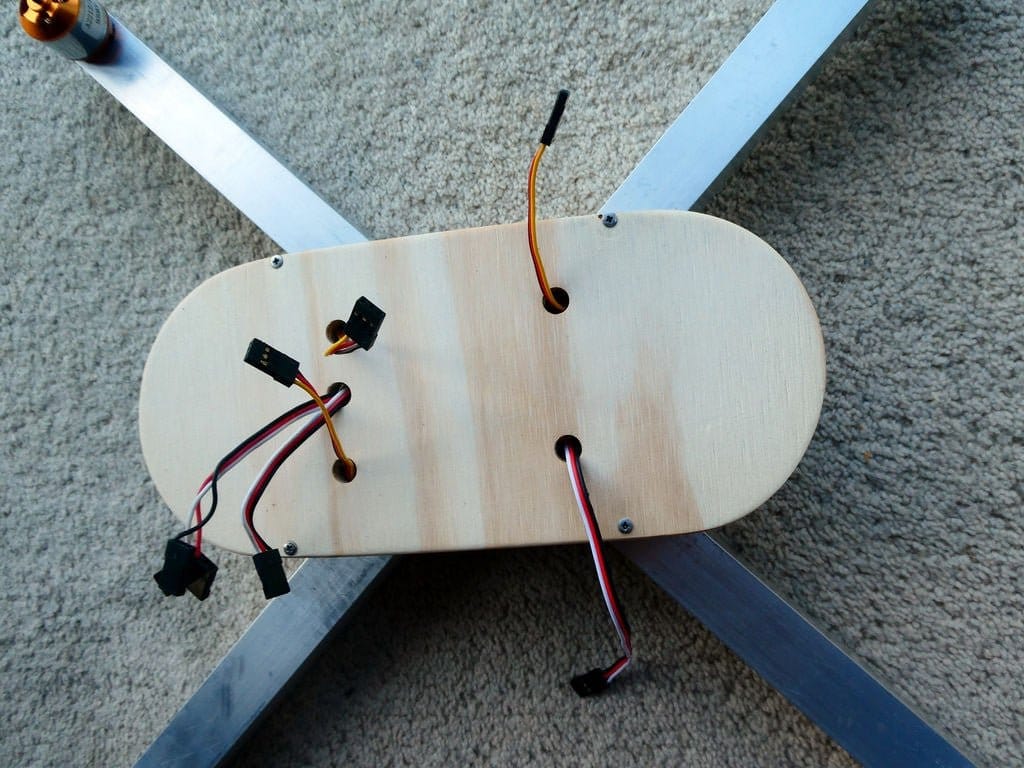
Протяните провода через рамку и протяните в отверстие, ESC закрепляется внутри трубок рамки.


 Соедините все черные (минус) и все красные (плюс) провода вместе. Припаяйте два провода к разъему XT60 (красный и черный). Закрепите приемник к корпусу с помощью двустороннего скотча.
Соедините все черные (минус) и все красные (плюс) провода вместе. Припаяйте два провода к разъему XT60 (красный и черный). Закрепите приемник к корпусу с помощью двустороннего скотча.
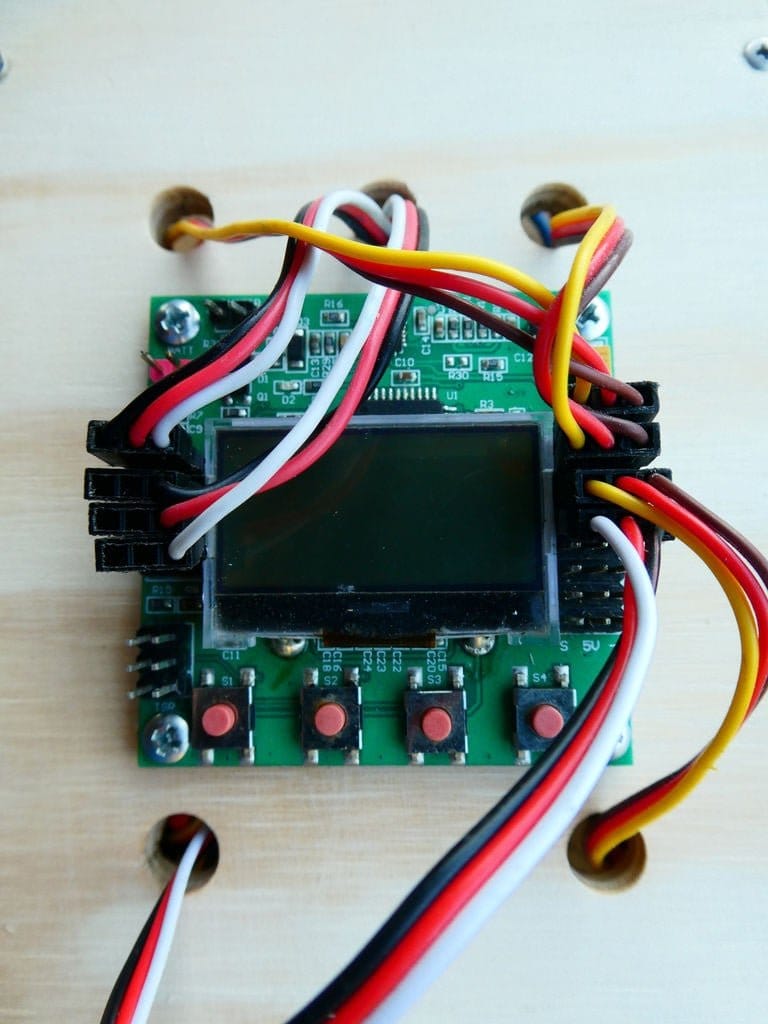
Протяните провода от контроллера и приемника через отверстия в крышке отсека, затем прикрутите крышку. Прикрутите контроллер к крышке. Подсоедините провода к плате управления полетом.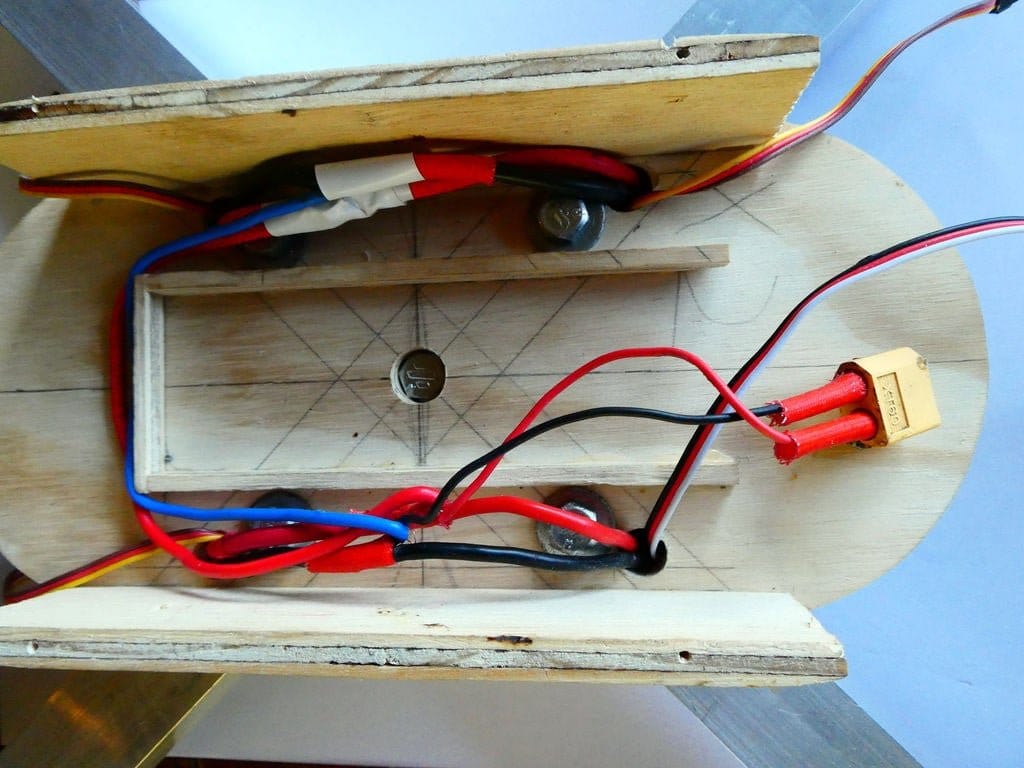

 Шаг четвертый: настройка
Шаг четвертый: настройка
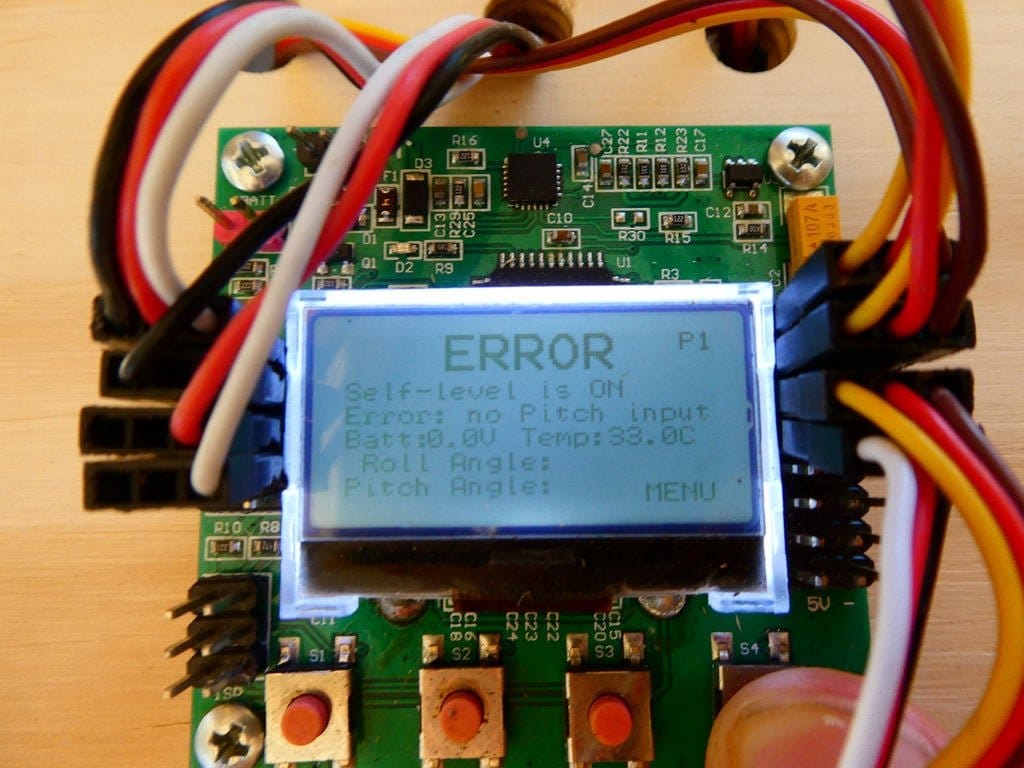
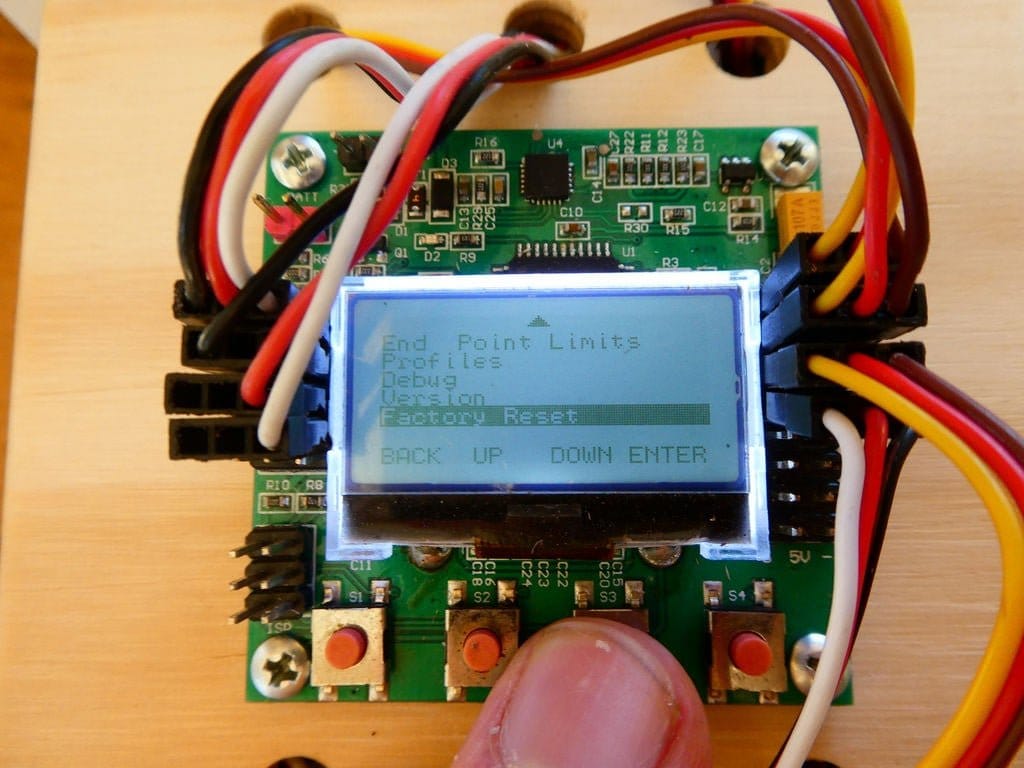
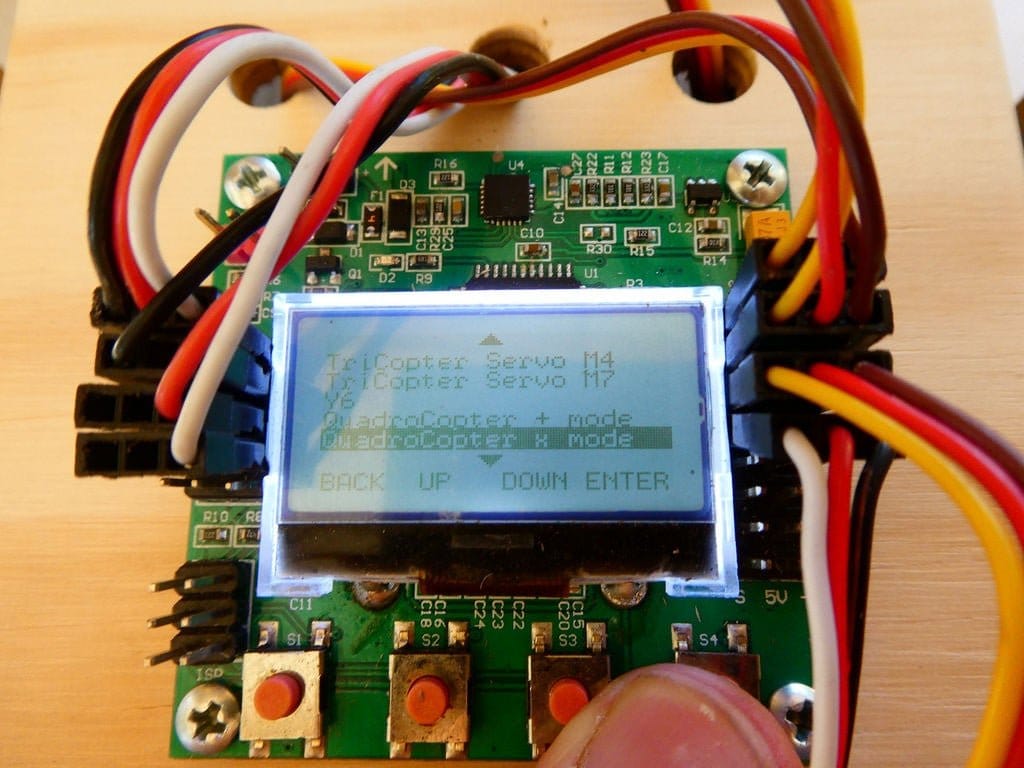
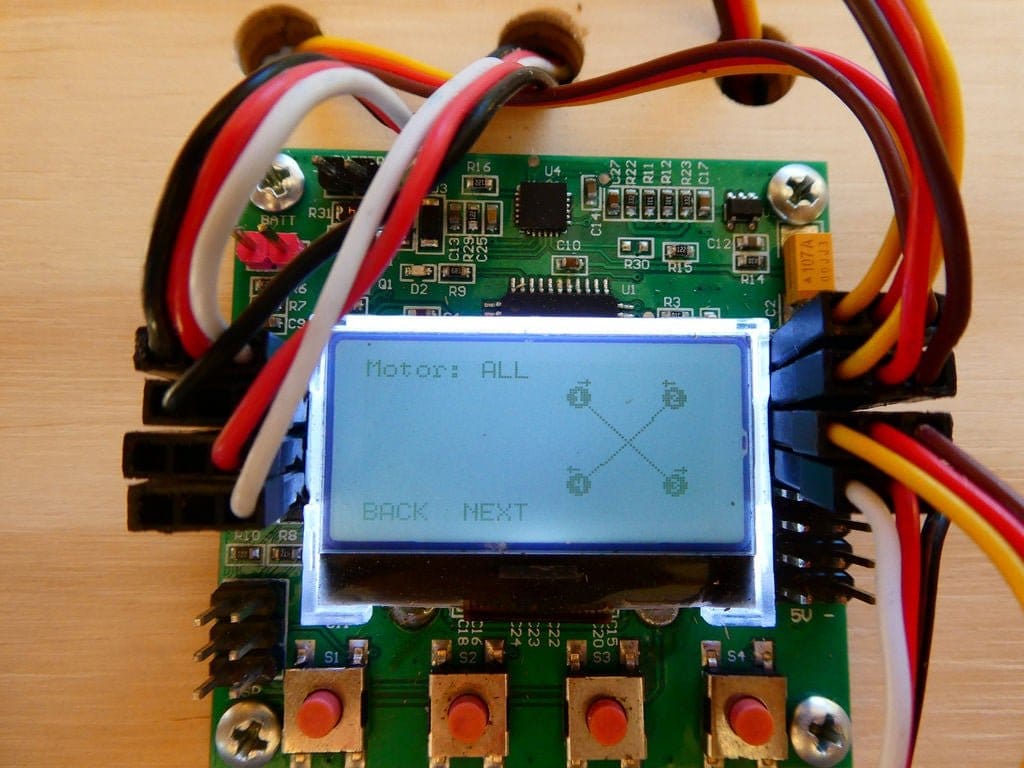
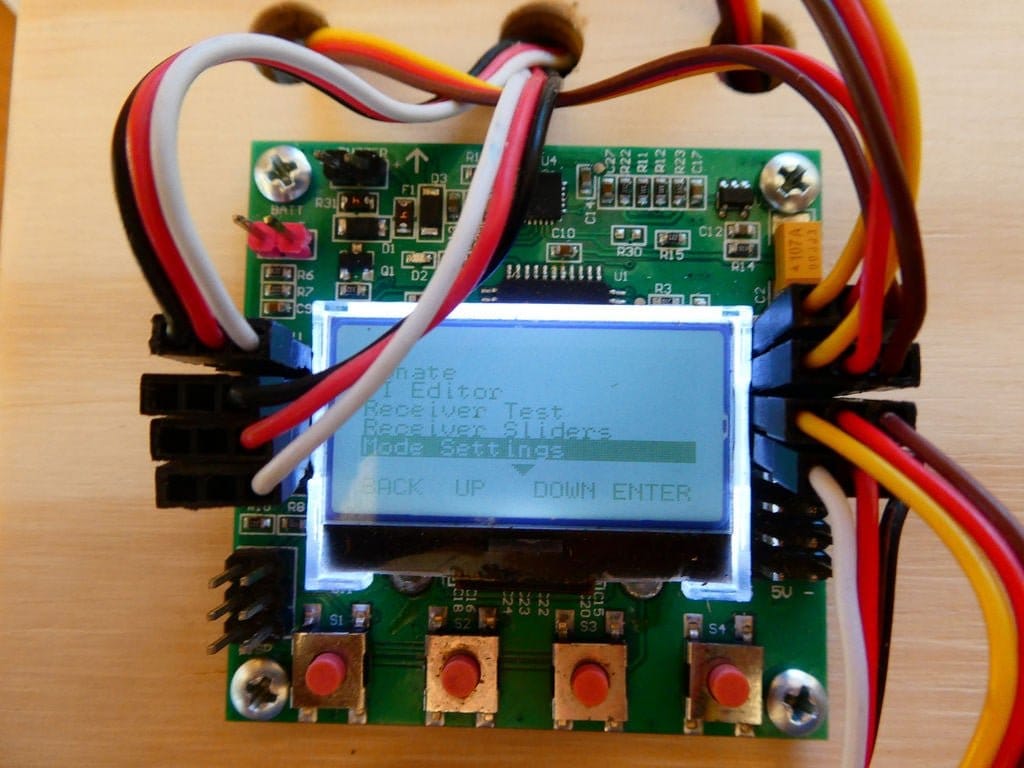
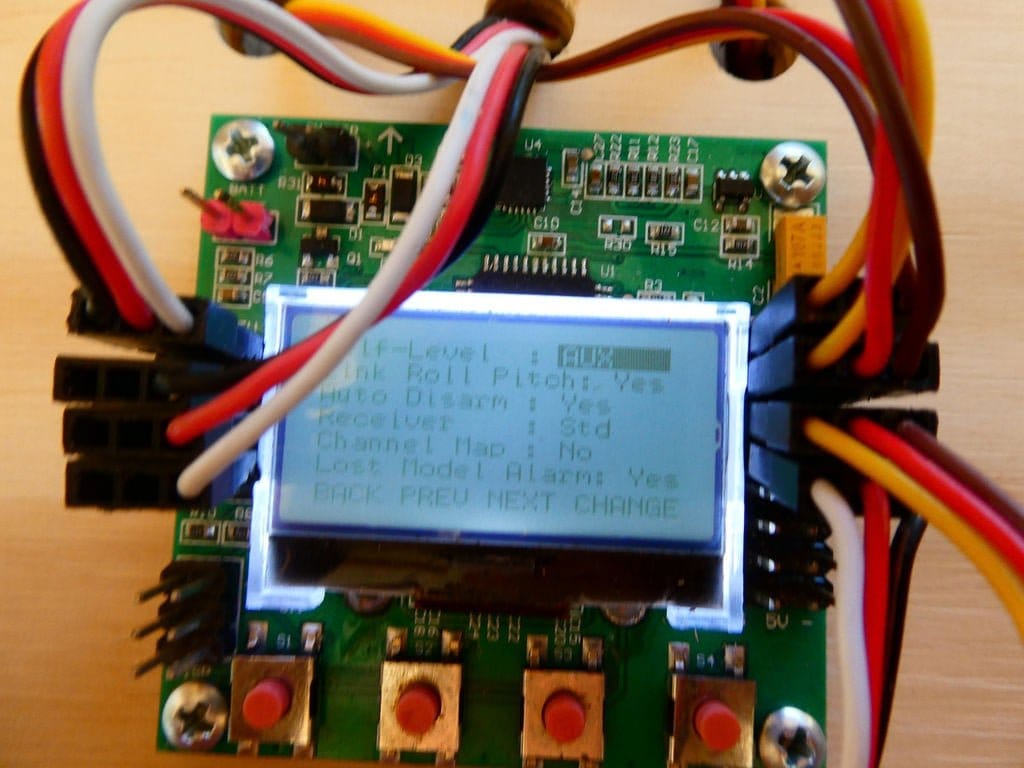
Подключите батарею и контроллер должен загрузиться. На дисплее должно появиться сообщение об ошибке. Проигнорируйте его и нажмите кнопку меню. Прокрутите вниз и нажмите «сброс настроек». Затем должно появиться меню для выбора желаемой рамы дронов. Прокрутите вниз, пока не дойдете до режима Quadcopter- X и нажмите «принять». Нажмите назад и выберите «калибровка AUX». Поместите дрон на ровную поверхность и нажмите «калибровать». Когда это будет сделано, прокрутите вверх до настроек режима и измените автоматический уровень с «AUX» на «Always».
Отключите аккумулятор, включите контроллер, а затем снова подключите аккумулятор. Контроллер полета должен включиться и показывать SAFE. Переместить left в левый угол, и дисплей должен измениться с SAFE на ARMED,

 Шаг пятый: пропеллеры
Шаг пятый: пропеллеры
Закрепите винты на валы двигателя.
 Все готово. И напоследок несколько советов от мастера.
Все готово. И напоследок несколько советов от мастера.
По началу квадрокоптер может показаться сложным в управлении. Лучший способ начать полет — это подняться примерно на 1 метр над землей и полетать назад и вперед, влево и вправо, а затем начать полет квадрокоптера по кругу. Квадрокоптер не любит «рыскающий» полет, поэтому учитесь плавно управлять.
Начиная летать, держите заднюю часть дрона лицом к себе, чтобы вы всегда знали.
Винты из углеродного волокна прочнее пластиковых и не так ломаются.



Источник: В гостях у Самоделкина






{kind=link}